





상품상세정보
▶ Product Description
The HERO platform (the Heterogeneous Extensible Robot Open Platform) is a low-power, high-performance, mini-sized heterogeneous system platform solution for intelligent robots (including service robots, medical robots, self-driving cars, etc.). In this platform, the CPU acts as a control center, paired with FPGAs to provide efficient performance. The complete HERO hardware system features an Intel® CoreTM processor with an Intel Arria 10 GX Series 1150 FPGA as a heterogeneous accelerator.
The traditional FPGA programming has proved problematic to most software engineers, yet the HERO platform provides a solution for everyone. In addition to the traditional professional programming model, the HERO platform’s customized BSP (Board Support Package) also supports OpenCL-based flow development, providing a friendly programming interface for a wide range of algorithms and software programming for software engineers. For a customized system to support OpenCL flow, it requires FPGA hardware to provide complete data and control paths other than compatible software from the host. The OpenCL kernel can then be loaded dynamically in real time and run on the FPGA platform. To support OpenCL Flow, the full FPGA board support package has been ported to the HERO platform and is available as an integral part of the HERO SDK. The FPGA logic part of the existing HERO SDK BSP mainly includes a high-speed communication interface PCIe IP core, a memory DMA controller, an off-chip high-speed memory DDR4 interface, and a communication interface with the FPGA internal module. If users want to increase the speed of communications between the FPGA and the external interface, the HERO platform also has a corresponding BSP reference design that guides customers to implement a variety of flexible external interfaces for better and faster communication.
The HERO platform has broad application prospects. Take the service robot as an example, its main role is to help people complete tasks and actions. To achieve this goal, R&D engineers need to implement a variety of complex applications on the robot, including vision, positioning, motion, and grabbing. FPGAs can be of great value in these critical applications, making the processing of complex algorithms efficient and real-time, giving users a good experience.
▶ Specifications
Installed software
- Linux Ubuntu 16.04
- Intel® FPGA Runtime for OpenCLTM Linux x86-64
- Intel® OpenVINO Toolit with FPGA Support
FPGA System
FPGA
- Intel Arria 10 GX FPGA (10AX115S2F45I1SG)
FPGA Configuration
- On-Board USB Blaster II or JTAG header for FPGA programming
- Fast Passive Parallel (FPPx32) configuration via MAX II CPLD and flash memory
Memory
- 256MB FLASH
- 2GB DDR4-2400 x64
Communication and Expansion
- PCI Express (PCIe) x8 edge connector
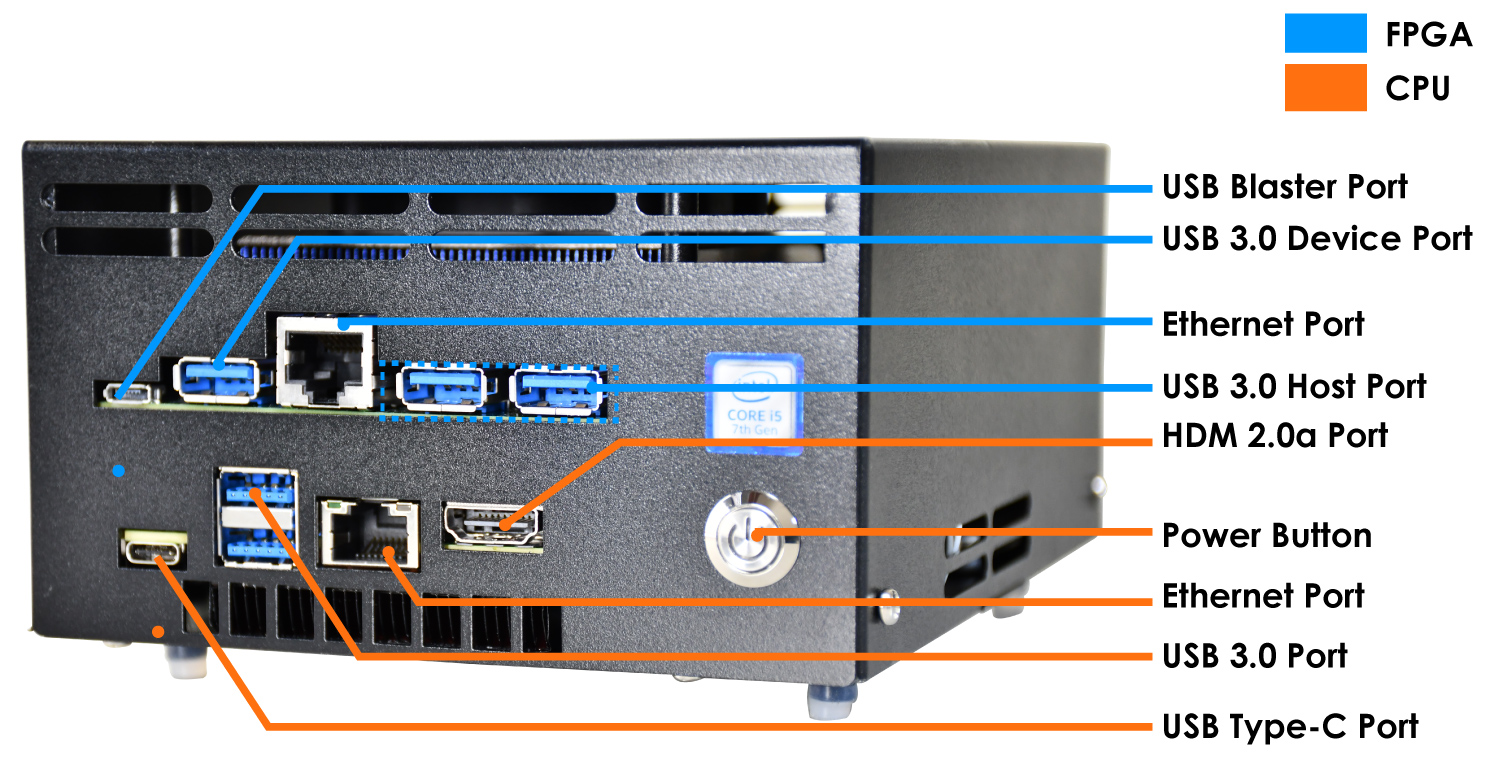
- USB 3.0 Host/Device
- Gigabit Ethernet
- UART
- CAN
- SPI
- I2C
Others
- General user input / output:
- 8 LEDs
- 3 Push-buttons
- 8 DIP Switch
- On-Board Clock
- 50/100/125MHz Fixed Clock
- Programmable Clock Generator
- System Monitor and Control
- Temperature sensor
- Power Monitor
CPU System
- Processor: Intel® CoreTM processor
- RAID configuration: 256GB
- Memory type: 8GB-2400
- Graphic output: HDMI 2.0a; USB-C (DP1.2)
- Integrated LAN: 10/100/1000
- Integrated WiFi: Intel® Wireless-AC 8265 + Bluetooth 4.2
- USB 3.0 configuration: two host ports
- USB Type-C configuration: One port, support Thunderbolt 3 (40Gbps) USB 3.1 Gen 2 (10Gbps) and DP 1.2
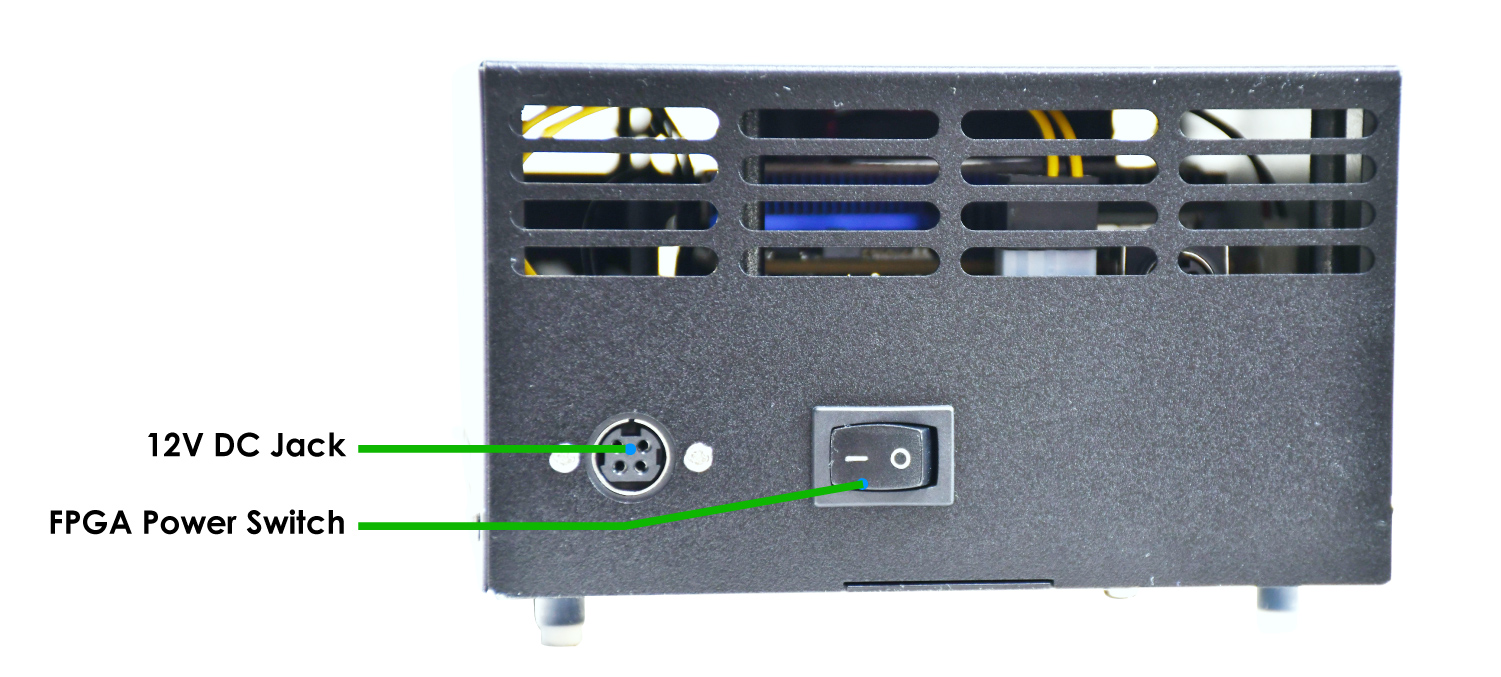
▶ Layout

▶ Resources
Documents
| Title | Version | Size(KB) | Date Added | Download |
|---|---|---|---|---|
| HERO Quick Start Guide | v1 | 1089 | 2018-09-28 |  |
| Hardware Manual | 2018-09-28 |  | ||
| Demonstration Manual | 2018-09-28 | |
More resources about IP and Dev. Kit are available on Altera User Forums.
▶ Kit Contents

- HERO
- 12V DC Adaptor
- AC Cable
- Micro USB Cable
배송안내
● 이니프로에서 판매하는 모든 제품은 이니프로에서 통관 처리후 우체국 택배로 배송됩니다.
● 국내재고가 있는 경우 결제일로부터 3~4 영업일 안에 국내재고가 없는 경우 결제일로부터 3주 안에 배송됩니다.
● 현재 국내재고가 있는지 확인하시려면 1:1 문의 게시판에 남겨주시거나 sales@inipro.net 으로 메일을 보내주시기 바랍니다.
● 제조사 재고가 부족하여 3주 안에 배송이 어려울 경우 메일로 안내해 드리니 참고하시기 바랍니다.
교환 및 반품안내
● 제품 수령후 7일이내에 이니프로 고객센터에 연락하여 교환 및 반품 처리 요청하면 교환 가능합니다.
● 제품은 박스 상단에 아이디 또는 성함 등을 표기한 후 쇼핑몰 하단의 주소 및 연락처로 택배 발송해 주시기 바랍니다.
● 제품 및 제품포장 박스 등에 손상된 부분이 없는지 고객센터에서 확인한 후 교환 및 반품 처리됩니다.
환불안내
● 제품 수령후 7일이내에 이니프로 고객센터에 연락하여 환불 요청하면 환불 가능합니다.
● 제품은 박스 상단에 아이디 또는 성함 등을 표기한 후 쇼핑몰 하단의 주소 및 연락처로 택배 발송해 주시기 바랍니다.
● 제품 및 제품포장 박스 등에 손상된 부분이 없는지 고객센터에서 확인한 후 환불수수료(5천원+판매가의1%)을 제외한 나머지 금액을 환불 처리해 드립니다.
AS안내
● 제품 보증 기간이 90일인 제품입니다.
● 납품후 90일 이내에는 무상 AS, 90일 이후에는 유상 AS 처리됩니다.
이미지 확대보기HERO-i5 Board



비밀번호 인증
글 작성시 설정한 비밀번호를 입력해 주세요.
장바구니 담기
상품이 장바구니에 담겼습니다.
바로 확인하시겠습니까?
찜 리스트 담기
상품이 찜 리스트에 담겼습니다.
바로 확인하시겠습니까?
CS CENTER
02-6956-9010문의 및 요청 사항을 1:1 문의 게시판에 남겨주시거나 sales@inipro.net 으로 메일을 보내주시면 최대한 빨리 처리해 드리도록 하겠습니다.
BANK INFO
1005-702-341569우리은행
예금주 : 이니프로주식회사


